Alrighty then....I figured if I have some motivation for this project, I'd post it up. And now that a Brand New XMod Street is up for grabs, I think I have my motivation. BTW, thanks to all who made this December COTM possible - it's very generous of those who got the prizes going. They should yield some amazing entries.
So, here it is. The XCrawler is getting revamped. I have taken several ideas from myself as well as others and formed an overall plan of how I want this to turn out. I figured the most important things that need changing are:
---Articulation. This really kills the performance of the crawler, IMO, so it needs fixed. I want to use a three-link setup on the 1.5.0. You'll see.

---Transmission. The HS-55 worked well for about 8 months. The motor is just too small to be put under the conditions of crawling. I plan on a larger motor geared down so the 1.5.0 has speed as well as torque.
---Steering. The stock steering was terrible. It had no power or steering angle. A Hitec servo should take care of that.
---Tires. I'm staying with the Aoshimas, but adding a little something. It should improve traction and keep the truck's center of gravity low.
Keep in mind that this is the XCrawler
1.5.0. I need to finish it in 13 days. That includes chassis and some sick paintwork. The XCrawler
2.0.0 has radical plans. *cough* Berg axles *cough*

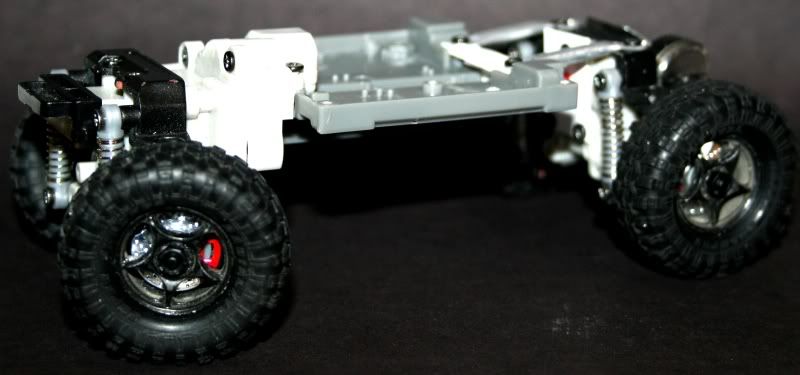



These pics are the
beginnings of the project. By no means take these at the final plan. Stay tuned for updates.
-Lancer